|
|
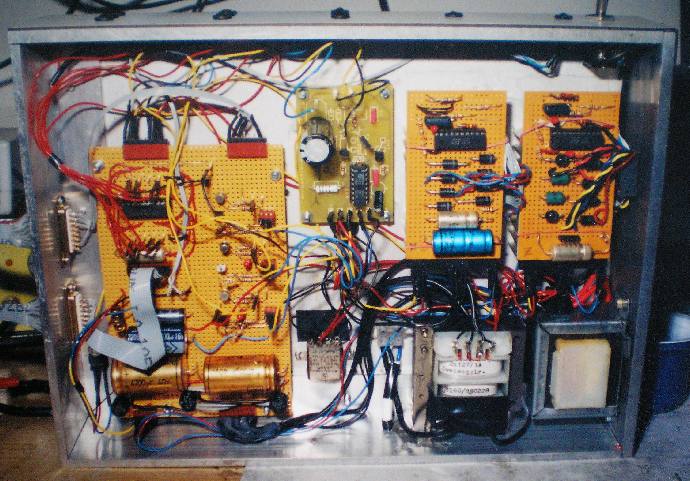
1990 waren es einfache Versuche mit der Z80PIO – Schnittstelle. Ein Jahr später war´s dann der fertige Roboter, angesteuert von meinem Schneider CPC 464. Für den gabs von Vortex einen Z80 Assembler / Disassembler, fertig in der Speichererweiterung integriert! Damit habe ich dann den Programmcode für die Schrittmotoren der 3 Achsen geschrieben. Die Bedienung wie: Lernphase - Ausführung - Speichern von Abläufen und Ausdrucken der Koordinaten habe ich in BASIC programmiert. Die erlernten Koordinaten wurden zur schnellen Ausführung an den Assembler übergeben, dieser sorgte dann für die schnelle und simultane Abarbeitung aller Achsen. Zum Antrieb habe ich unterschiedliche Schrittmotoren verwendet. Die Nullpositionen der Achsen habe ich mit Reflexlichtschranken eingelesen. |
|
|
|
|
|
Ich war ein großer Fan vom ATARI ST. Der war damals im Vergleich zum PC ein ausgefeiltes System mit einer Grafikoberfäche. Sehr beliebt auf Uni´s und der Musikszene. |
|
|
Zum Experimentieren hatte ich eine ST -Platine in ein 19“ - Rack mit Erweiterungsbus integriert und mich mit dem Motorola 68000 Assembler beschäftigt.
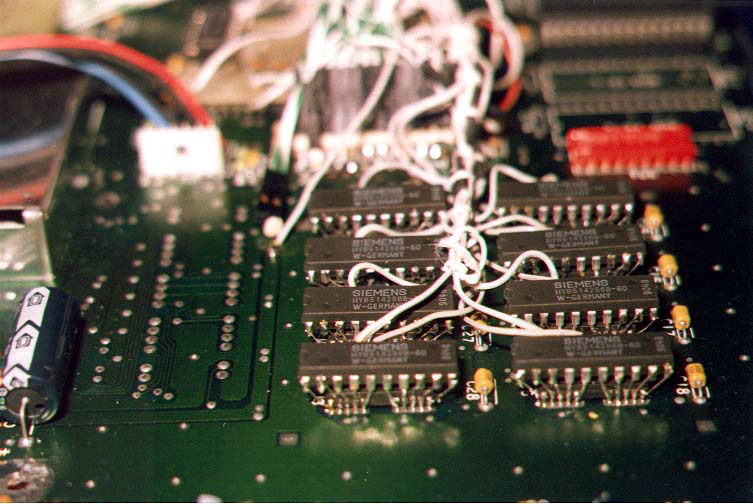
Beim ATARI ST war die Speichererweiterung mit feinsten Lötarbeiten verbunden, wenn man´s mit der Billiglösung Huckepack realisierte. |
|
|
Meine wilde Spezialverdrahtung mit Huckepack- IC´s hielt ohne Probleme über die ganze ATARI-Zeit durch!
22.03.2020 |